

Reactieve vermogen condensator compensatie-3 (Lokale reactieve vermogen compensatie)
Lokale condensatorcompensatie voor motorkringen
In praktische energiesystemen kan het equivalente circuit van de meeste elektrische apparatuur (inclusief inductiemotoren) worden beschouwd als een serieschakeling van weerstand en inductie . De arbeidsfactor is:
Wanneer een condensator parallel wordt geschakeld aan de kring, wordt de stroomvergelijking:
![]()
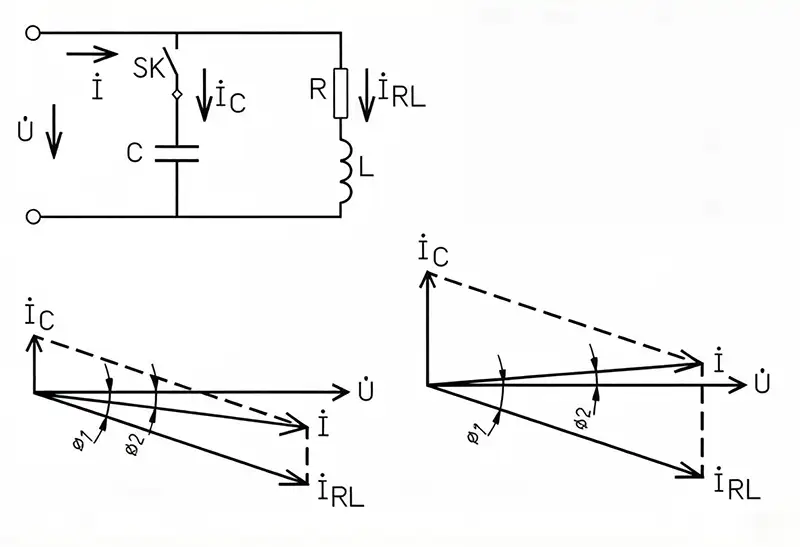
Figuur 3 toont het fasordiagram van de compensatie.
Figuur 3 Ondercompensatie en Overcompensatie
-
In het linker fasordiagram (ondercompensatie) loopt de stroomvector na op de spanningsfasor.
-
In het rechter fasordiagram (overcompensatie) loopt de stroomvector voor op de spanningsfasor.
Overcompensatie is over het algemeen ongewenst omdat dit een toename van de secundaire spanning van de transformator kan veroorzaken. Bovendien leidt capacitief blindvermogen ook tot energieverliezen en verhoogt het de temperatuurstijging en het verlies van de condensator, waardoor de levensduur ervan wordt beïnvloed.
Tabel 1 geeft de aanbevolen condensatorcapaciteit voor het verbeteren van de arbeidsfactor van motorische belastingen:
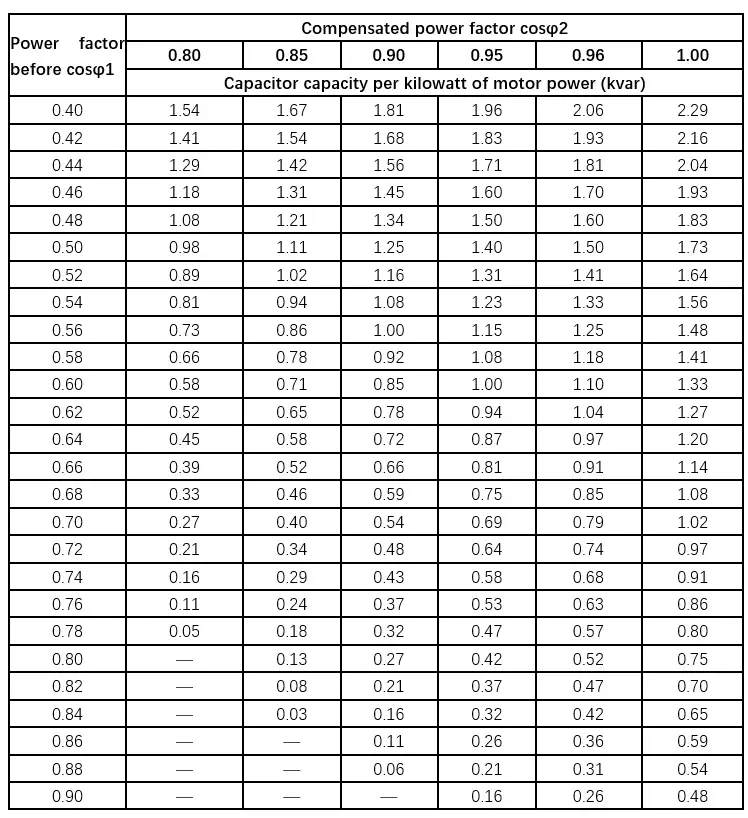
Instructies voor het gebruik van de tabel:
-
Algemeen compensatiescenario: Voor een motorische belasting met een typische arbeidsfactor van 0,7, die moet worden gecompenseerd naar 0,9, geeft de tabel een compensatiefactor van 0,586 kvar/kW. Voor een actief vermogen van 100 kW is de totale benodigde compensatiecondensatorcapaciteit: 100 kW × 0,586 kvar/kW = 58,6 kvar.
-
Kritische beperking: Voor driefasige wisselstroominductiemotoren mag het compensatievermogen niet meer dan 90% van het nullastblindvermogen van de motor bedragen. Dit is om overspanning te voorkomen die kan optreden als gevolg van overcompensatie wanneer de motor wordt uitgeschakeld.
-
Vereenvoudigde berekeningsformule: De compensatiecondensator voor motorische belastingen kan ook bij benadering worden geschat met behulp van de volgende vereenvoudigde formule:
waarbij
het nominale vermogen van de motor is.
Qc is de capaciteit van de compensatiecondensator.





