

Reactive Power Capacitor Compensation-3(Compensação local de potência reativa)
Compensação Local de Capacitores para Circuitos de Motores
Em sistemas de potência práticos, o circuito equivalente da maioria dos equipamentos elétricos (incluindo motores de indução) pode ser considerado como um circuito série de resistência e indutância . Seu fator de potência é:
Quando um capacitor é conectado em paralelo ao circuito , a equação de corrente se torna:
![]()
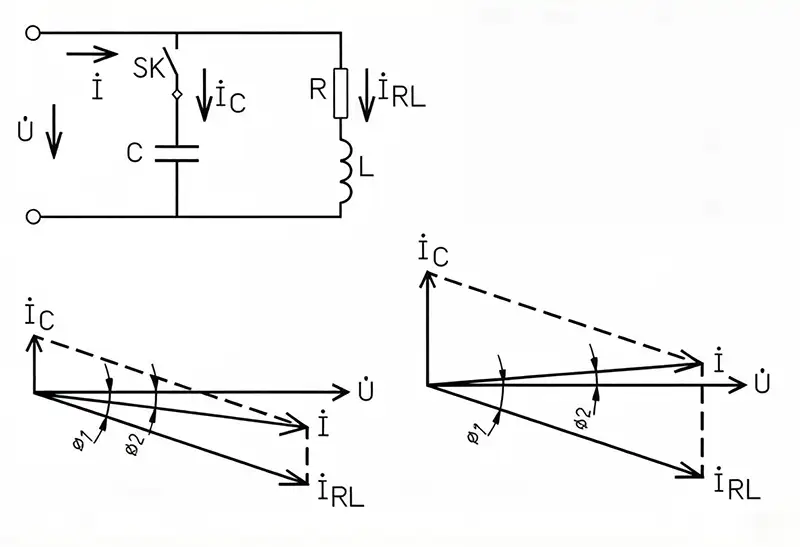
A Figura 3 mostra o diagrama fasorial da compensação.
Figura 3 Subcompensação e Sobrec compensação
-
No diagrama fasorial à esquerda (subcompensação), o vetor de corrente está atrasado em relação ao fasor de tensão.
-
No diagrama fasorial à direita (sobrecompensação), o vetor de corrente está adiantado em relação ao fasor de tensão.
A sobrecompensação geralmente é indesejável, pois pode causar um aumento na tensão secundária do transformador. Além disso, a potência reativa capacitiva também leva a perdas de energia e aumenta a elevação de temperatura e a perda do capacitor, afetando assim sua vida útil.
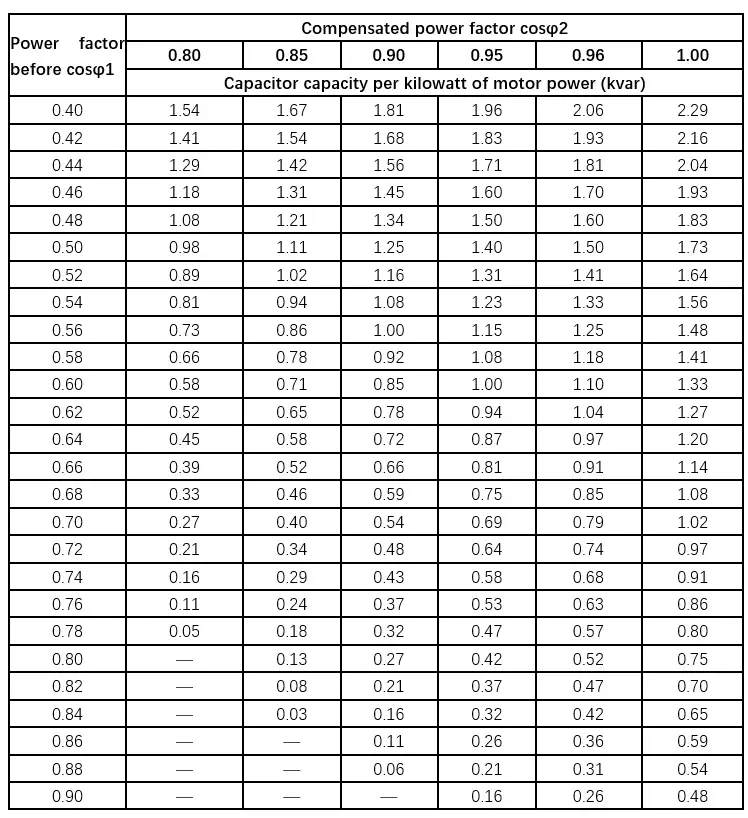
A Tabela 1 fornece a capacidade de capacitor recomendada para melhorar o fator de potência de cargas de motores:
Instruções para Uso da Tabela:
-
Cenário de Compensação Geral: Para uma carga de motor com fator de potência típico de 0,7, se precisar ser compensada para 0,9, a tabela fornece um fator de compensação de 0,586 kvar/kW. Para uma potência ativa de 100 kW, a capacidade total necessária do capacitor de compensação é: 100 kW × 0,586 kvar/kW = 58,6 kvar.
-
Limitação Crítica: Para motores de indução trifásicos CA, a potência de compensação não deve exceder 90% da potência reativa a vazio do motor. Isso é para evitar sobretensão que pode ocorrer devido à sobrecompensação quando o motor é desligado.
-
Fórmula de Cálculo Simplificada: O capacitor de compensação para cargas de motores também pode ser estimado aproximadamente usando a seguinte fórmula simplificada:
onde
é a potência nominal do motor.
Qc é a capacitância do capacitor de compensação.





